Введение в Ethernet
Ethernet — это семейство технологий для построения компьютерных сетей, которое доминирует в области проводных локальных сетей (Local Area Networks, LAN) с момента своего создания в 1970-х годах. По своей сути, Ethernet определяет набор правил и стандартов, описывающих как физическое соединение устройств (кабели, разъемы, электрические сигналы), так и логический способ передачи данных между ними на низком уровне.
Основное назначение Ethernet — обеспечить надежную и высокопроизводительную среду для передачи пакетов данных, называемых кадрами (frames), между устройствами, находящимися в одном сегменте сети.
Архитектурные принципы Ethernet
В основе успеха и долговечности технологии Ethernet лежат несколько ключевых архитектурных принципов:
-
Простота и масштабируемость: Изначальная концепция была предельно проста — все устройства подключаются к общей передающей среде и "слушают" ее. Хотя с тех пор технология претерпела колоссальные изменения (переход от коаксиальных кабелей к витой паре, от концентраторов к коммутаторам), базовый принцип формирования и адресации кадров остался неизменным, что позволило технологии легко масштабироваться от скоростей 10 мегабит в секунду (Мбит/с) до 100 гигабит в секунду (Гбит/с) и выше.
-
Уникальная аппаратная адресация: Каждое Ethernet-совместимое устройство в мире обладает уникальным 48-битным идентификатором, "прошитым" в него на заводе — MAC-адресом (Media Access Control Address). Этот механизм позволяет однозначно идентифицировать отправителя и получателя на канальном уровне, что является фундаментом для всей сетевой коммуникации.
-
Стандартизация: Ethernet стандартизирован Институтом инженеров электротехники и электроники (IEEE) под общим названием IEEE 802.3. Этот открытый и общепринятый стандарт гарантирует, что сетевое оборудование от абсолютно разных производителей (например, сетевая карта в Repka Pi, коммутатор Cisco и сервер Dell) сможет без проблем взаимодействовать друг с другом.
Почему Ethernet является стандартом для проводных сетей?
Совокупность исторических и технических факторов сделала Ethernet де-факто и де-юре стандартом для проводных локальных сетей.
- Надежность: Проводное соединение по своей природе гораздо более устойчиво к помехам, внешним воздействиям и проблемам с прохождением сигнала, чем беспроводные технологии, такие как Wi-Fi. Это обеспечивает стабильно высокую скорость и низкие задержки, что критически важно для серверов, стационарных рабочих станций и встраиваемых систем, таких как Repka Pi.
- Производительность: Современные стандарты Ethernet (Gigabit Ethernet, 10 Gigabit Ethernet) предлагают пропускную способность, значительно превосходящую возможности большинства беспроводных сетей.
- Безопасность: Доступ к проводной сети физически ограничен. Для подключения злоумышленнику требуется прямой доступ к кабельной инфраструктуре, в то время как беспроводные сети подвержены более широкому спектру удаленных атак.
- Стоимость и доступность: Благодаря массовому производству и десятилетиям развития, Ethernet-оборудование (кабели, коммутаторы, сетевые карты) является чрезвычайно доступным и широко распространенным.
Для устройства, подобного Repka Pi, наличие встроенного Ethernet-порта является ключевым преимуществом. Оно позволяет интегрировать плату в существующую локальную сеть для создания надежных сетевых приложений: от домашних серверов и систем "умного дома" до промышленных контроллеров и систем видеонаблюдения, где стабильность и скорость соединения имеют первостепенное значение.
Ethernet в модели OSI: Уровень 1 (Физический) и Уровень 2 (Канальный)
Для стандартизации и понимания сложных процессов сетевого взаимодействия используется эталонная модель взаимодействия открытых систем (Open Systems Interconnection, OSI). Эта модель разделяет всю сетевую коммуникацию на семь логических уровней, где каждый уровень выполняет свою специфическую задачу и предоставляет услуги вышестоящему уровню.
Технология Ethernet оперирует на двух самых нижних и фундаментальных уровнях этой модели, обеспечивая базис для всех более высокоуровневых протоколов, таких как IP, TCP и HTTP.
Уровень 1: Физический уровень (Physical Layer)
-
Назначение: Этот уровень отвечает за неструктурированную передачу битов по физической среде. Он имеет дело с электрическими, механическими и функциональными аспектами соединения.
-
Роль Ethernet на Уровне 1: Стандарты Ethernet четко определяют все физические компоненты и процессы:
- Среда передачи: Типы кабелей (например, витая пара категории 5e, 6) и их характеристики.
- Механические интерфейсы: Спецификация разъемов (например, 8P8C, широко известный как RJ45) и их распиновка.
- Электрическое кодирование: Как логические
1и0преобразуются в электрические сигналы (уровни напряжения, модуляция), которые могут быть переданы по медному кабелю. Например, стандарт Gigabit Ethernet использует сложную схему кодирования PAM-5. - Скорость передачи: Определение стандартных скоростей (10 Мбит/с, 100 Мбит/с, 1000 Мбит/с).
На этом уровне нет понятий "кадр", "адрес" или "данные". Есть только биты, передаваемые в виде электрических или световых (в случае оптоволокна) сигналов. Аппаратный блок EPHY (Ethernet Physical Layer Transceiver) на Repka Pi является компонентом, который полностью реализует функции Физического уровня.
Уровень 2: Канальный уровень (Data Link Layer)
-
Назначение: Этот уровень отвечает за надежную передачу данных между двумя соседними узлами в одном сегменте сети. Его главная задача — взять "сырой" поток битов от физического уровня и организовать его в структурированные блоки, называемые кадрами (frames).
-
Роль Ethernet на Уровне 2: Это "сердце" технологии Ethernet. Стандарты Ethernet определяют:
- Структуру кадра: Четкий формат каждого кадра, включая преамбулу, адреса назначения и источника, поле типа протокола и контрольную сумму.
- Физическую адресацию: Использование уникальных 48-битных MAC-адресов для идентификации каждого устройства в сети.
- Контроль доступа к среде (Media Access Control, MAC): Правила, по которым устройства получают доступ к общей среде передачи. В современных коммутируемых сетях это сводится к прямой отправке кадра в порт коммутатора.
- Обнаружение ошибок: Механизм проверки целостности кадра с помощью контрольной суммы (Frame Check Sequence, FCS) на основе алгоритма CRC. Если принятый кадр имеет неверную контрольную сумму, он отбрасывается как поврежденный.
Аппаратный блок EMAC (Ethernet Media Access Control) в SoC Repka Pi является компонентом, который реализует функции Канального уровня. Он формирует исходящие кадры и анализирует входящие, проверяя их адреса и целостность.
Итог: Ethernet предоставляет полный стек для уровней 1 и 2. Он обеспечивает как физический способ передачи сигналов, так и логический способ организации этих сигналов в кадры и их доставки к конкретному устройству в локальной сети. Все протоколы более высоких уровней (IP, TCP, UDP), которые отвечают за маршрутизацию между сетями и управление сеансами связи, полностью полагаются на Ethernet как на надежный "транспорт" для доставки своих данных в пределах одного сетевого сегмента.
Ключевые понятия
Для понимания логики работы Ethernet необходимо освоить три основных концепции: уникальную идентификацию устройств (MAC-адрес), структуру единицы данных (кадр) и способы доставки этих данных (типы передачи).
MAC-адрес (Media Access Control Address): Уникальный аппаратный идентификатор
-
Определение: MAC-адрес — это уникальный 48-битный (6-байтный) идентификатор, который присваивается каждому сетевому интерфейсу (сетевой карте, Wi-Fi адаптеру) производителем на этапе изготовления. Этот адрес "прошивается" в аппаратное обеспечение и является его постоянным, глобально уникальным "паспортом".
-
Структура и формат: MAC-адрес принято записывать в шестнадцатеричной форме, разделяя байты двоеточиями или дефисами.
- Пример:
00:1A:2B:3C:4D:5E - Первые 3 байта (24 бита): Называются OUI (Organizationally Unique Identifier). Этот префикс назначается производителю оборудования организацией IEEE. По нему можно определить, кто изготовил данное сетевое устройство (например, префикс
00:1A:2Bможет принадлежать компании Intel). - Последние 3 байта (24 бита): Называются NIC Specific. Эта часть адреса назначается самим производителем и должна быть уникальной в пределах его OUI.
- Пример:
-
Назначение: Основная роль MAC-адреса — обеспечить однозначную идентификацию отправителя и получателя в пределах одного сегмента локальной сети (L2). Когда сетевой коммутатор получает Ethernet-кадр, он смотрит на MAC-адрес назначения и пересылает кадр только на тот физический порт, к которому подключено устройство с этим адресом. Repka Pi, как и любое сетевое устройство, имеет свой уникальный MAC-адрес для своего Ethernet-интерфейса.
Ethernet-кадр (Frame): Базовая единица передачи данных
-
Определение: Ethernet не передает данные сплошным потоком. Вместо этого он разбивает их на дискретные, структурированные пакеты, называемые кадрами (frames). Кадр — это минимальная и неделимая единица данных на канальном уровне.
-
Инкапсуляция: Ethernet-кадр выступает в роли "конверта" или "контейнера". Когда протокол более высокого уровня (например, IP) хочет отправить пакет данных, канальный уровень "упаковывает" этот IP-пакет внутрь Ethernet-кадра, добавляя к нему необходимую служебную информацию.
-
Базовая структура: Каждый Ethernet-кадр содержит как минимум:
- MAC-адрес назначения: MAC-адрес устройства, которому предназначен кадр.
- MAC-адрес источника: MAC-адрес устройства, которое отправило кадр.
- Полезная нагрузка (Payload): Сами данные, которые нужно передать (например, IP-пакет).
- Контрольная сумма (FCS): Значение для проверки целостности кадра, чтобы убедиться, что он не был поврежден при передаче.
Более детально структура кадра будет рассмотрена в следующей главе.
Типы передачи: Unicast, Multicast, Broadcast
На канальном уровне Ethernet поддерживает три различных способа доставки кадра, которые определяются типом MAC-адреса назначения.
-
Unicast(Одиночная передача):- Что это: Это стандартная передача "один к одному".
- Как работает: В качестве MAC-адреса назначения указывается уникальный MAC-адрес одного конкретного устройства в сети. Сетевой коммутатор, получив такой кадр, доставит его только на тот порт, к которому подключен этот получатель. Это наиболее эффективный и распространенный тип передачи.
-
Broadcast(Широковещательная передача):- Что это: Передача "один ко всем".
- Как работает: В качестве MAC-адреса назначения используется специальный, зарезервированный адрес
FF:FF:FF:FF:FF:FF. Коммутатор, получив кадр с таким адресом, разошлет его копию на все активные порты, кроме того, с которого он пришел. - Применение: Используется для служебных протоколов, когда нужно отправить сообщение всем устройствам в сети, не зная их конкретных адресов. Классический пример — ARP-запрос (Address Resolution Protocol), когда устройство спрашивает: "Кто в сети имеет такой-то IP-адрес?".
-
Multicast(Многоадресная передача):- Что это: Передача "один ко многим".
- Как работает: В качестве MAC-адреса назначения используется специальный адрес из зарезервированного диапазона. Устройства, которые заинтересованы в получении таких данных, могут "подписаться" на этот multicast-адрес. Умные (управляемые) коммутаторы будут отправлять такие кадры только на те порты, где есть "подписчики".
- Применение: Используется для эффективной доставки потоковых данных, таких как IPTV или онлайн-трансляции, группе заинтересованных получателей без необходимости рассылать копии всем (как в broadcast) или отправлять индивидуальный пакет каждому (как в unicast).
Сравнение с другими технологиями (Wi-Fi, оптоволокно)
Хотя Ethernet является доминирующим стандартом для проводных локальных сетей, он не является единственной технологией передачи данных. Для полного понимания его роли необходимо сравнить его с двумя другими распространенными технологиями: беспроводной связью (Wi-Fi) и оптической связью (оптоволокно).
Ethernet vs. Wi-Fi (IEEE 802.11)
Wi-Fi является основной технологией для беспроводного доступа к сети. Сравнение с Ethernet наиболее актуально в контексте домашних и офисных сетей.
| Параметр | Ethernet (Витая пара) | Wi-Fi (Радиоэфир) |
|---|---|---|
| Среда передачи | Физический медный кабель. | Радиоволны (2.4 ГГц, 5 ГГц, 6 ГГц). |
| Надежность | Высокая. Соединение защищено от большинства радиопомех, не зависит от физических препятствий (стен). | Средняя/Низкая. Качество сигнала зависит от расстояния, наличия стен, помех от других Wi-Fi сетей и бытовых приборов. |
| Производительность | Стабильно высокая. Gigabit Ethernet (1000 Мбит/с) является стандартом. Скорость практически не зависит от количества подключенных устройств. | Переменная. Заявленная скорость (например, 1200 Мбит/с) является теоретической. Реальная скорость ниже и делится между всеми активными устройствами, подключенными к одной точке доступа. |
| Задержка (Latency) | Очень низкая. Минимальные задержки, что критически важно для онлайн-игр, IP-телефонии и промышленных систем. | Выше. Задержки выше и менее предсказуемы из-за природы радиосвязи и необходимости избегать коллизий в эфире. |
| Безопасность | Высокая. Требуется физический доступ к кабелю или сетевому оборудованию для перехвата трафика. | Средняя. Требует надежного шифрования (WPA2/WPA3). Сигнал можно перехватить "по воздуху" на расстоянии. |
| Мобильность | Отсутствует. Устройство жестко привязано к месту расположения сетевой розетки. | Высокая. Обеспечивает полную свободу перемещения в пределах зоны покрытия. |
| Вывод для Repka Pi | Идеально для стационарных устройств, требующих максимальной надежности и производительности (серверы, NAS, системы видеонаблюдения). | Подходит для проектов, где важна мобильность или прокладка кабеля затруднена. |
Ethernet vs. Оптоволокно (Fiber Optics)
Оптоволокно используется в основном для магистральных каналов связи, соединений между зданиями и в центрах обработки данных, но постепенно проникает и в офисные сети ("оптика до рабочего места").
| Параметр | Ethernet (Витая пара) | Оптоволокно |
|---|---|---|
| Среда передачи | Электрические сигналы по медным проводам. | Световые импульсы по стеклянному или пластиковому волокну. |
| Дальность передачи | Ограничена. Стандартно до 100 метров без дополнительного оборудования. | Очень большая. От нескольких сотен метров (многомодовое волокно) до десятков километров (одномодовое волокно). |
| Помехозащищенность | Средняя. Чувствительна к сильным электромагнитным помехам (например, от силового оборудования). | Абсолютная. Полностью невосприимчива к электромагнитным помехам, так как передает свет, а не электричество. |
| Пропускная способность | Высокая (1-10 Гбит/с является стандартом). | Очень высокая. Легко достигает 10, 40, 100 Гбит/с и выше. |
| Безопасность | Высокая, но теоретически возможно подключиться к кабелю для перехвата сигнала. | Максимальная. Физически подключиться к оптоволоконному кабелю для незаметного перехвата данных чрезвычайно сложно. |
| Стоимость | Низкая. Кабели и сетевое оборудование широко доступны и недороги. | Высокая. Требуются специальные трансиверы (SFP-модули), кабели и оборудование. Более хрупкое и требует аккуратного монтажа. |
| Вывод для Repka Pi | Ethernet-порт на Repka Pi является стандартным и достаточным для 99.9% задач. | Оптоволокно для прямого подключения к Repka Pi не используется. Оно является технологией "уровнем выше", к которой сеть с Repka Pi может быть подключена через коммутатор. |
Заключение: Ethernet на витой паре представляет собой оптимальный компромисс между производительностью, надежностью, стоимостью и простотой развертывания для локальных сетей, что и делает его неотъемлемым атрибутом таких устройств, как Repka Pi.
Принципы работы на канальном уровне
Канальный уровень (Layer 2) определяет, как данные структурируются и доставляются в пределах одного сегмента локальной сети. Для Ethernet основой этого уровня является кадр (frame) — строго определенный пакет данных, который выступает в роли "конверта" для информации, передаваемой от одного устройства другому.
Структура Ethernet-кадра (Frame Format)
Каждый пакет данных, передаваемый по сети Ethernet, должен соответствовать стандартизированной структуре кадра, определенной в стандарте IEEE 802.3. Этот структурированный контейнер позволяет сетевым устройствам однозначно интерпретировать поток битов, определять отправителя, получателя и проверять целостность данных.
Визуальное представление стандартного кадра Ethernet II:
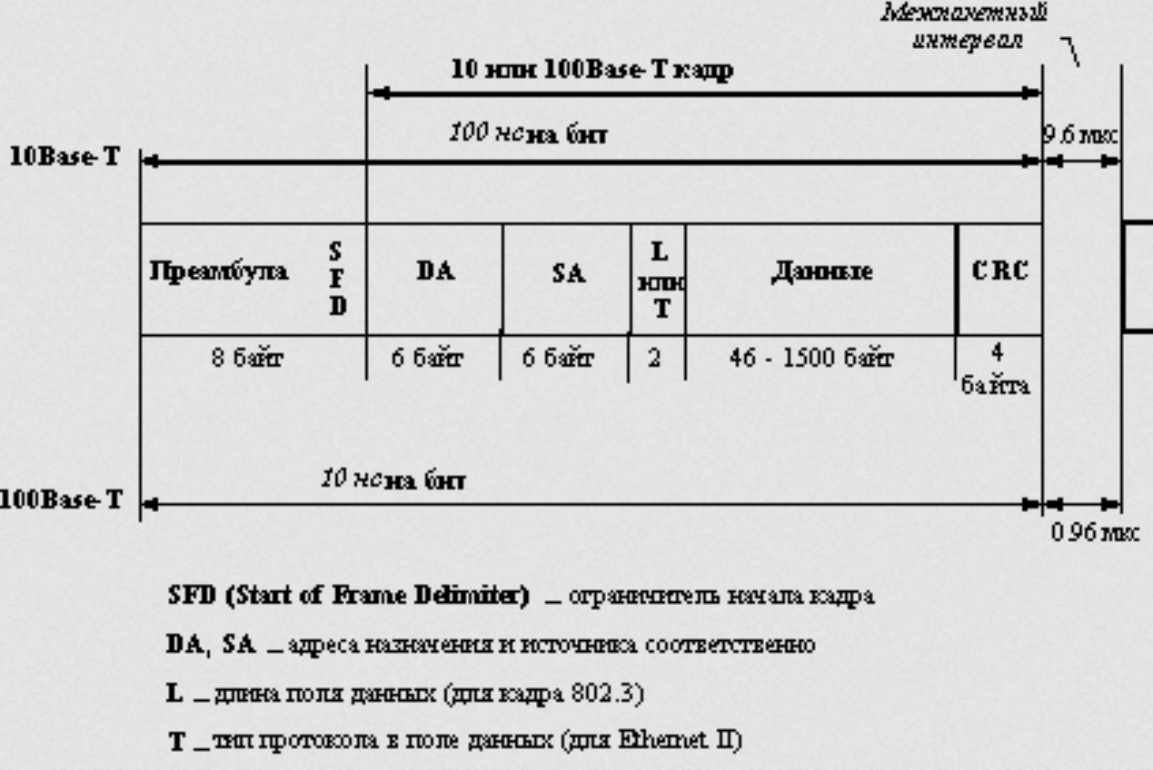
Рассмотрим каждый компонент этого кадра в деталях.
Преамбула и SFD (Start Frame Delimiter)
- Назначение: Синхронизация на физическом уровне. Эти поля не являются частью данных, а служат служебным сигналом для принимающего устройства.
- Механизм:
- Преамбула (Preamble): Это последовательность из 7 байт, состоящая из чередующихся единиц и нулей (
10101010 ...). Этот предсказуемый, ритмичный сигнал позволяет приемнику (сетевой карте) "подстроиться" под тактовую частоту передатчика и синхронизировать свои внутренние часы. - SFD (Start Frame Delimiter / Ограничитель начала кадра): Это один байт со значением
10101011. Он нарушает чередующийся паттерн преамбулы и служит однозначным маркером, который сообщает приемнику: "Синхронизация завершена, следующий бит — это первый бит MAC-адреса назначения".
- Преамбула (Preamble): Это последовательность из 7 байт, состоящая из чередующихся единиц и нулей (
MAC-адреса назначения и источника
- Назначение: Идентификация получателя и отправителя кадра в локальной сети.
- Механизм:
- MAC-адрес назначения (Destination MAC Address): Первые 6 байт заголовка. Сетевые устройства (в первую очередь коммутаторы) анализируют это поле, чтобы определить, на какой физический порт необходимо переслать данный кадр.
- MAC-адрес источника (Source MAC Address): Следующие 6 байт. Это поле указывает, какое устройство отправило кадр. Коммутаторы используют это поле для изучения топологии сети и построения своих таблиц MAC-адресов.
Поле EtherType: Идентификация протокола верхнего уровня (IPv4, ARP)
- Назначение: Указание на тип данных, которые "упакованы" в полезную нагрузку кадра. Это поле является ключевым связующим звеном между Канальным (L2) и Сетевым (L3) уровнями.
- Механизм: Это 2-байтное поле содержит код, который сообщает операционной системе принимающего устройства, какому протоколу или службе следует передать данные из полезной нагрузки для дальнейшей обработки.
- Распространенные значения EtherType:
0x0800: Полезная нагрузка содержит пакет протокола IPv4.0x0806: Полезная нагрузка содержит пакет протокола ARP (Address Resolution Protocol).0x86DD: Полезная нагрузка содержит пакет протокола IPv6.
Полезная нагрузка (Payload): Данные от верхних уровней
- Назначение: Это поле содержит сами данные, которые необходимо передать. Это может быть IP-пакет, ARP-сообщение или пакет любого другого протокола, указанного в поле EtherType.
- Механизм:
- Размер: Размер полезной нагрузки может варьироваться от 46 до 1500 байт.
- Padding (Заполнение): Если данные от верхнего уровня занимают менее 46 байт, Ethernet-контроллер отправителя автоматически добавляет "пустые" байты (заполнение), чтобы довести размер поля до минимально необходимого. Это требование исторически связано с работой механизма обнаружения коллизий CSMA/CD.
- MTU (Maximum Transmission Unit): Максимальный размер в 1500 байт определяет максимальный объем данных, который можно передать в одном Ethernet-кадре.
Контрольная сумма кадра (FCS / CRC): Проверка целостности
- Назначение: Обнаружение ошибок, которые могли возникнуть при передаче кадра по физической среде (например, из-за электромагнитных помех).
- Механизм:
- FCS (Frame Check Sequence): Это 4-байтное (32-битное) поле, расположенное в самом конце кадра.
- CRC (Cyclic Redundancy Check): Перед отправкой кадра передающее устройство выполняет математический расчет (CRC32) над всеми полями кадра (от MAC-адреса назначения до полезной нагрузки) и помещает результат в поле FCS.
- Принимающее устройство выполняет точно такой же расчет над полученными данными. Затем оно сравнивает свой результат со значением, содержащимся в поле FCS.
- Результат проверки: Если значения совпадают, кадр считается неповрежденным. Если нет — значит, произошла ошибка, и принимающее устройство молча отбрасывает (discards) этот кадр. Ethernet на канальном уровне не предусматривает механизма повторной отправки; эта задача возлагается на протоколы более высоких уровней, такие как TCP.
Метод доступа к среде: От CSMA/CD к коммутации
Метод доступа к среде — это набор правил, который определяет, как именно устройства, подключенные к общей сети, координируют свои действия, чтобы избежать "столкновения" своих передач и обеспечить упорядоченную коммуникацию. История Ethernet — это история эволюции этого метода.
Исторический аспект: CSMA/CD в сетях на концентраторах (Hub)
На заре развития Ethernet (в эпоху стандартов 10BASE-5 и 10BASE-2 на коаксиальном кабеле, а затем и 10BASE-T на витой паре с концентраторами), все устройства в сети физически находились в одной общей передающей среде. Это означает, что электрический сигнал, отправленный одним устройством, распространялся и был виден всем остальным устройствам. Этот общий сегмент называется доменом коллизий (collision domain).
Для работы в таких условиях был разработан метод доступа CSMA/CD (Carrier Sense Multiple Access with Collision Detection / Множественный доступ с контролем несущей и обнаружением коллизий).
Принцип работы CSMA/CD: Представьте это как вежливый разговор в большой комнате, где все говорят по очереди.
- Carrier Sense (Контроль несущей): Перед тем как начать говорить (передавать данные), устройство "слушает" сеть, чтобы убедиться, что она свободна (никто другой в данный момент не передает).
- Multiple Access (Множественный доступ): Все устройства имеют равные права на доступ к среде.
- Collision Detection (Обнаружение коллизий): Если два устройства решают, что сеть свободна, и начинают передачу одновременно, их сигналы накладываются друг на друга и искажаются. Это событие называется коллизией.
- Устройства, обнаружив коллизию (по аномальному уровню напряжения в сети), немедленно прекращают передачу.
- Они отправляют в сеть короткий "jam-сигнал", чтобы все остальные участники также поняли, что произошла коллизия.
- Затем каждое из "столкнувшихся" устройств ждет случайный промежуток времени (алгоритм экспоненциальной отсрочки), после чего снова пытается начать передачу с шага 1.
Сетевые концентраторы (Hubs): Концентратор — это простое устройство 1-го (Физического) уровня, которое работает как электрический повторитель. Любой сигнал, приходящий на один его порт, просто копируется и отправляется на все остальные порты. Таким образом, сеть, построенная на концентраторах, представляет собой один большой домен коллизий, и все устройства в ней вынуждены работать по правилам CSMA/CD.
Недостатки CSMA/CD:
- Полудуплексный режим (Half-Duplex): Устройство может либо передавать, либо принимать данные, но не делать это одновременно.
- Низкая эффективность: С ростом количества устройств в сети вероятность коллизий резко возрастает, а полезная пропускная способность сети катастрофически падает.
Современный подход: Работа в полнодуплексном режиме с коммутаторами (Switch)
Современные Ethernet-сети строятся на основе коммутаторов (Switches), а не концентраторов. Это стало возможным благодаря повсеместному использованию кабеля "витая пара", который содержит отдельные пары проводов для передачи и для приема.
Сетевые коммутаторы (Switches): Коммутатор — это интеллектуальное устройство 2-го (Канального) уровня. В отличие от концентратора, он не просто копирует сигналы.
- Изучение MAC-адресов: Коммутатор анализирует MAC-адреса источников в приходящих кадрах и строит внутреннюю таблицу (MAC-address table), в которой сопоставляет MAC-адреса с физическими номерами портов.
- Интеллектуальная фильтрация и коммутация: Получив кадр, коммутатор смотрит на его MAC-адрес назначения, находит соответствующий порт в своей таблице и отправляет кадр только на этот конкретный порт.
Эффект от коммутации:
- Разделение доменов коллизий: Каждый порт коммутатора является отдельным, изолированным доменом коллизий. Коллизии могут произойти только на одном порту, если к нему подключен старый концентратор, но они никогда не распространятся на другие порты.
- Полный дуплекс (Full-Duplex): Поскольку каждый порт коммутатора представляет собой выделенное соединение "точка-точка" с подключенным устройством, и используются отдельные пары для передачи и приема, необходимость в CSMA/CD полностью отпадает. Устройство может одновременно передавать и принимать данные на полной скорости своего подключения.
- Максимальная производительность: В коммутируемой сети общая пропускная способность не делится между устройствами. Если 10 устройств подключены к коммутатору на скорости 1 Гбит/с, каждое из них получает свою гарантированную полосу пропускания в 1 Гбит/с для связи с другими устройствами.
Аппаратная реализация Ethernet на Repka Pi
Для обеспечения высокоскоростной и надежной сетевой связи в Repka Pi используется не программная эмуляция, а специализированный аппаратный Ethernet-контроллер, интегрированный непосредственно в однокристальную систему (SoC). Эта реализация состоит из двух функционально различных, но тесно связанных между собой компонентов: EMAC и EPHY.
Архитектура SoC: Ethernet-контроллер в однокристальной системе
Обзор блок-схемы: EMAC и EPHY в секции "Connectivity"
При анализе блок-схемы SoC Allwinner (например, H6) видно, что компоненты, отвечающие за Ethernet, сгруппированы в секции "Connectivity" (Средства связи). Это подчеркивает их роль как интерфейса для связи с внешним миром. В этой секции мы видим два ключевых акронима: EMAC и EPHY.
EMAC(Ethernet Media Access Control) — это цифровой, логический компонент. Он является частью самого кристалла SoC.EPHY(Ethernet Physical Layer Transceiver) — это аналого-цифровой компонент. Он может быть как интегрирован в тот же кристалл, так и вынесен в отдельную микросхему на печатной плате.
Такое разделение соответствует разделению функций между Канальным (Layer 2) и Физическим (Layer 1) уровнями модели OSI.
EMAC (Ethernet Media Access Control): "Мозг" операции
EMAC — это ядро Ethernet-контроллера. Этот аппаратный блок отвечает за всю логическую работу, предусмотренную на Канальном уровне (L2). Его можно считать "мозгом" сетевого интерфейса.
Основные задачи, выполняемые EMAC:
-
Формирование и разбор кадров:
- При передаче:
EMACберет данные, подготовленные драйвером (полезную нагрузку), и "упаковывает" их в полноценный Ethernet-кадр. Он аппаратно добавляет преамбулу, SFD, MAC-адреса назначения и источника, поле EtherType и вычисляет контрольную сумму (FCS), которую помещает в конец кадра. - При приеме:
EMACвыполняет обратную операцию. Он анализирует входящий поток битов, находит границы кадра, проверяет MAC-адрес назначения (чтобы убедиться, что кадр предназначен именно этому устройству) и проверяет контрольную сумму FCS. Если все в порядке, он "извлекает" полезную нагрузку и передает ее дальше в систему.
- При передаче:
-
MAC-адресация: Внутри
EMACесть специальные регистры, в которые "прошит" уникальный MAC-адрес устройства. Он использует это значение для поля "MAC-адрес источника" в исходящих кадрах и для фильтрации входящих. -
Взаимодействие с системой:
EMACтесно интегрирован с другими системными блоками, такими как DMA-контроллер. Это позволяет ему эффективно обмениваться данными с оперативной памятью, передавая целые блоки данных без участия центрального процессора.
EPHY (Ethernet Physical Layer Transceiver): "Мускулы" операции
EPHY, или физический приемопередатчик, отвечает за всю работу на Физическом уровне (L1). Если EMAC — это мозг, то EPHY — это "мускулы" и "голосовые связки", которые превращают цифровые данные в физические сигналы и наоборот.
Основные задачи, выполняемые EPHY:
-
Кодирование и декодирование:
EPHYберет готовый цифровой поток битов отEMACи кодирует его в сложные электрические сигналы, которые могут быть переданы по медному кабелю витой пары. Для Gigabit Ethernet, например, используется сложная схема 5-уровневой импульсно-амплитудной модуляции (PAM-5). При приеме он выполняет обратное декодирование. -
Электрический интерфейс:
EPHYнапрямую управляет электрическими параметрами на выводах порта RJ45: уровнями напряжения, формой импульсов и т.д. -
Автосогласование (Auto-Negotiation): При подключении кабеля
EPHYзапускает специальный протокол, обмениваясь сигналами с устройством на другом конце кабеля (например, с коммутатором). В ходе этого процесса они автоматически "договариваются" о максимально возможной скорости (10, 100 или 1000 Мбит/с) и режиме работы (полудуплекс или полный дуплекс), поддерживаемых обоими устройствами. -
Определение статуса "линка":
EPHYпостоянно отслеживает качество сигнала на линии. Именно он определяет, установлено ли физическое соединение ("линк есть"), и управляет светодиодными индикаторами на порту RJ45.
Связь между EMAC и EPHY: Эти два блока общаются между собой по стандартизированному интерфейсу, такому как MII (Media Independent Interface) или его более скоростным вариантам (RGMII, GMII). Это позволяет производителям плат гибко выбирать: использовать ли EPHY, встроенный в SoC, или подключить более производительную внешнюю микросхему EPHY к EMAC процессора.
Таким образом, EMAC и EPHY — это два неразрывных компонента, которые в тандеме реализуют всю сложную логику и физику протокола Ethernet, предоставляя операционной системе готовый и надежный канал для передачи данных.
Физический интерфейс: Порт RJ45
Физической точкой подключения Repka Pi к проводной сети является стандартный модульный разъем 8P8C, широко известный под названием RJ45. Этот разъем является конечной точкой, куда приходят сигналы от EPHY-контроллера, и обеспечивает механическое и электрическое соединение с сетевым кабелем.
Назначение контактов
Внутри разъема RJ45 находится 8 контактов, которые соединяются с 8 проводами кабеля "витая пара". Для стандарта Gigabit Ethernet (1000BASE-T) задействованы все четыре пары проводов для одновременной двунаправленной передачи данных.
- Контакты 1, 2: Двунаправленная дифференциальная пара A.
- Контакты 3, 6: Двунаправленная дифференциальная пара B.
- Контакты 4, 5: Двунаправленная дифференциальная пара C.
- Контакты 7, 8: Двунаправленная дифференциальная пара D.
Использование дифференциальных пар (где сигнал передается по двум проводам с противоположной полярностью) является ключевым для подавления внешних электромагнитных помех и обеспечения надежной передачи на высокой скорости.
Роль встроенных трансформаторов (магнетиков)
Если посмотреть на конструкцию порта RJ45 на плате Repka Pi, можно заметить, что это не просто пластиковый разъем. Внутри его корпуса (или в непосредственной близости от него) расположен важный компонент, называемый сетевым трансформатором или магнетиками (magnetics). Он выполняет три критически важные функции:
- Гальваническая развязка: Это основная задача. Трансформатор физически разрывает электрический контакт между схемой Repka Pi и сетевым кабелем. Он передает данные с помощью электромагнитной индукции, а не прямого электрического тока. Это защищает чувствительную электронику Repka Pi от статического электричества, скачков напряжения и разности потенциалов, которые могут возникнуть в длинном сетевом кабеле.
- Симметрирование сигнала: Трансформатор преобразует несимметричный сигнал от EPHY-контроллера в симметричный (дифференциальный) сигнал, необходимый для передачи по витой паре, и выполняет обратное преобразование.
- Подавление синфазных помех: Он эффективно отфильтровывает помехи, которые одинаково воздействуют на оба провода в паре, дополнительно повышая надежность связи.
Светодиодные индикаторы (LED): Link и Activity
В корпус порта RJ45 обычно встроены два светодиодных индикатора, которые предоставляют быструю визуальную диагностику состояния сетевого подключения.
-
Индикатор "Link" (Соединение):
- Назначение: Показывает статус физического соединения.
- Поведение: Обычно горит постоянно зеленым или оранжевым цветом, когда EPHY-контроллер успешно установил физическое соединение ("линк") с устройством на другом конце кабеля (например, с коммутатором). Если индикатор не горит, это свидетельствует о физической проблеме: плохой кабель, неисправный порт на коммутаторе или отсутствие подключения. Цвет индикатора часто указывает на скорость соединения (например, зеленый для 1 Гбит/с, оранжевый для 100 Мбит/с).
-
Индикатор "Activity" (Активность):
- Назначение: Показывает наличие трафика на линии.
- Поведение: Мигает (обычно желтым цветом), когда по сети передаются или принимаются Ethernet-кадры. Интенсивность мигания примерно соответствует объему сетевого трафика. Если индикатор Link горит, но Activity не мигает, это означает, что физическое соединение есть, но обмен данными не происходит.
Автосогласование (Auto-Negotiation): Аппаратный механизм определения скорости
Современные Ethernet-сети поддерживают различные скорости (10, 100, 1000 Мбит/с) и режимы работы (полудуплекс, полный дуплекс). Чтобы устройства могли работать вместе, они должны "договориться" об общих параметрах. Этот процесс происходит автоматически и на аппаратном уровне благодаря механизму автосогласования.
- Принцип работы:
- При подключении кабеля (или при включении устройства) EPHY-контроллеры на обоих концах линии начинают обмениваться специальными электрическими импульсами — FLP (Fast Link Pulses).
- Эти импульсы кодируют информацию о возможностях каждого устройства: какие скорости и режимы дуплекса оно поддерживает.
- Получив информацию друг от друга, контроллеры выбирают наилучший общий режим работы, доступный обоим. Например, если Repka Pi (1000 Мбит/с, Full-Duplex) подключается к старому коммутатору (100 Мбит/с, Full-Duplex), они согласуют скорость 100 Мбит/с в полнодуплексном режиме.
- После успешного согласования устанавливается физический "линк", и загорается соответствующий индикатор.
Этот автоматический процесс, полностью выполняемый EPHY-контроллерами, избавляет пользователя от необходимости вручную настраивать скорость и режим работы порта, обеспечивая максимальную производительность и совместимость "из коробки".
Архитектура регистров EMAC (Низкоуровневый аспект)
Любое взаимодействие операционной системы с Ethernet-контроллером на самом низком уровне сводится к чтению и записи в его аппаратные регистры. EMAC (Ethernet Media Access Control) как сложный цифровой блок обладает обширным набором таких регистров, которые позволяют драйверу тонко настраивать его поведение и управлять процессом передачи данных. Хотя прикладной программист никогда не работает с ними напрямую, понимание их назначения дает полное представление о том, что происходит "под капотом" сетевого интерфейса.
Обзор ключевых регистров EMAC-контроллера
Ниже описаны основные функциональные группы регистров, типичные для EMAC-контроллера в SoC Allwinner.
Регистры управления (Control Registers)
Это основной "пульт управления" контроллером. Записью определенных битов в эти регистры драйвер активирует, деактивирует и конфигурирует ключевые функции.
-
Basic Control Register:- Включение/выключение приемника и передатчика (
RX_EN,TX_EN): Отдельные биты, которые разрешают или запрещают работу модулей приема и передачи. - Настройка дуплекса (
RGMII_LINK_MD): Бит, который принудительно устанавливает режим полного (Full-Duplex) или полудуплекса (Half-Duplex). В большинстве случаев этот бит настраивается автоматически по результатам автосогласования (Auto-Negotiation) с EPHY. - Настройка скорости (
RGMII_LINK_SPD): Биты, которые задают рабочую скорость (10, 100 или 1000 Мбит/с), также обычно устанавливаются автоматически.
- Включение/выключение приемника и передатчика (
-
Interrupt Enable Register: Регистр, в котором каждый бит соответствует определенному событию (например, "принят кадр", "передача завершена", "произошла ошибка"). Установка бита в1разрешает EMAC генерировать аппаратное прерывание по данному событию.
Регистры MAC-адреса (MAC Address Registers)
- Назначение: Хранение 48-битного MAC-адреса сетевого интерфейса.
- Принцип работы: Этот адрес обычно разделен на два 32-битных регистра (например,
MAC_ADDR_HIGHиMAC_ADDR_LOW). При инициализации драйвер считывает MAC-адрес из внешнего источника (например, EEPROM или конфигурационного файла) и записывает его в эти регистры. EMAC-контроллер использует это значение для:- Автоматической вставки в поле "MAC-адрес источника" во всех исходящих кадрах.
- Аппаратной фильтрации входящих кадров. Если MAC-адрес назначения в пришедшем кадре не совпадает с адресом в этих регистрах (и не является broadcast/multicast), EMAC отбрасывает кадр, не передавая его дальше в систему и не создавая лишней нагрузки.
Регистры состояния (Status Registers)
Эти регистры доступны только для чтения и предоставляют драйверу информацию о текущем состоянии контроллера, а также статистику и флаги ошибок.
Interrupt Status Register: "Зеркало" регистраInterrupt Enable. Когда происходит событие, для которого разрешено прерывание, соответствующий бит в этом регистре устанавливается в1. Прочитав этот регистр, драйвер может быстро определить причину прерывания.- Статистические счетчики (
Statistics Counters): EMAC аппаратно ведет подсчет различных событий. Существуют отдельные регистры-счетчики для:- Количества переданных/принятых байт.
- Количества переданных/принятых кадров (unicast, broadcast, multicast).
- Количества кадров с ошибками (ошибки CRC, слишком длинные/короткие кадры и т.д.). Эти счетчики крайне полезны для диагностики сети (например, утилита
ethtoolполучает свою статистику именно из этих регистров).
Указатели на буферы DMA (DMA Descriptor Pointers)
Это самая важная группа регистров для обеспечения высокой производительности. Прямое управление данными через регистры было бы слишком медленным. Вместо этого EMAC работает через дескрипторы — специальные структуры в оперативной памяти, которые описывают буферы с данными.
Transmit Descriptor List Address Register: Драйвер записывает в этот регистр физический адрес в оперативной памяти, где начинается "список задач" для передатчика. Каждая "задача" (дескриптор) содержит адрес буфера с готовым Ethernet-кадром и его длину.Receive Descriptor List Address Register: Аналогично, драйвер записывает сюда адрес списка "пустых" буферов, которые EMAC может использовать для сохранения принимаемых кадров.
Принцип работы с DMA:
- Драйвер готовит Ethernet-кадр в оперативной памяти.
- Драйвер создает дескриптор, указывающий на этот кадр.
- Драйвер дает EMAC-контроллеру команду "Начать передачу", просто "уведомив" его о появлении новой задачи в списке.
- EMAC и DMA-контроллер самостоятельно читают дескриптор, находят кадр в оперативной памяти, копируют его в свой внутренний FIFO и отправляют в сеть.
- После завершения они генерируют одно прерывание.
Этот механизм позволяет передавать и принимать тысячи кадров, задействуя ЦП только в самом начале и в самом конце этого процесса.
Роль сетевого драйвера в ядре Linux
Как мы увидели, EMAC-контроллер — это мощный, но очень сложный аппаратный блок, управляемый десятками регистров. Прямое взаимодействие с ним из пользовательской программы было бы не только крайне затруднительным, но и нарушило бы всю архитектуру безопасности и многозадачности операционной системы.
Всю сложность и ответственность за управление этим "железом" берет на себя сетевой драйвер — специализированный модуль, работающий в привилегированном пространстве ядра Linux. Драйвер для EMAC-контроллера Allwinner выполняет три критически важные функции.
1. Управление аппаратными ресурсами
Драйвер является единственным "хозяином" EMAC-контроллера. Он выполняет всю низкоуровневую работу:
- Инициализация: При загрузке системы драйвер сбрасывает контроллер, считывает MAC-адрес и записывает его в регистры
EMAC_ADDR_HIGH/LOW, настраивает базовые параметры вEMAC_BASIC_CTLи активирует приемник и передатчик. - Управление DMA: Драйвер выделяет в оперативной памяти области для дескрипторов и буферов данных. Затем он записывает физические адреса этих областей в регистры
EMAC_TX_DMA_DESC_LISTиEMAC_RX_DMA_DESC_LIST, фактически "знакомя" EMAC с его рабочим пространством в ОЗУ. - Управление прерываниями: Драйвер регистрирует свои функции-обработчики в общем контроллере прерываний (GIC). Когда EMAC генерирует прерывание (например, "принят пакет"), именно код драйвера выполняется, чтобы прочитать регистр
EMAC_INT_STA, определить причину и выполнить необходимые действия (например, забрать данные из буфера).
2. Абстракция и создание сетевого интерфейса
Драйвер скрывает всю эту аппаратную сложность и предоставляет операционной системе стандартизированный виртуальный сетевой интерфейс, такой как eth0. Для остальной части ядра Linux этот интерфейс выглядит одинаково, независимо от того, какой физический чип находится "под ним" — будь то EMAC от Allwinner, контроллер от Intel или Realtek.
Эта абстракция позволяет ядру работать с любым сетевым оборудованием, используя единый набор команд: "инициализировать интерфейс", "отправить пакет", "получить пакет", "получить статистику".
3. Интеграция с сетевым стеком TCP/IP
Это самая важная функция драйвера. Он служит мостом между Канальным уровнем (L2), на котором работает EMAC, и Сетевым уровнем (L3), где работает протокол IP и все, что выше.
-
При приеме данных:
- EMAC аппаратно принимает Ethernet-кадр и помещает его в буфер в ОЗУ с помощью DMA.
- EMAC генерирует прерывание.
- Драйвер "просыпается", забирает кадр из буфера.
- Он "распаковывает" Ethernet-кадр, смотрит на поле
EtherType. - Если
EtherTypeравен0x0800(IPv4), драйвер передает "полезную нагрузку" (IP-пакет) вверх по стеку — в подсистему IP ядра Linux. - Далее ядро анализирует IP-пакет, определяет, что это TCP-сегмент для порта 80, и помещает его в буфер сокета, который слушает ваша программа-вебсервер.
-
При передаче данных:
- Ваша программа записывает данные в сокет.
- Сетевой стек TCP/IP ядра формирует TCP-сегмент, затем IP-пакет.
- IP-подсистема передает IP-пакет вниз по стеку сетевому драйверу.
- Драйвер берет этот IP-пакет, "упаковывает" его в Ethernet-кадр (добавляя MAC-адреса и FCS) и помещает в буфер для DMA.
- Драйвер дает команду EMAC начать передачу.
Таким образом, сетевой драйвер — это не просто "прослойка" для управления регистрами. Это фундаментальный компонент, который интегрирует аппаратный EMAC-контроллер в сложную многоуровневую архитектуру сетевого стека TCP/IP, позволяя вашей простой команде socket.send() в Python в конечном итоге превратиться в последовательность электрических импульсов на кабеле витой пары.